| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |
- 프로그래머스
- 개인 피티
- 덤벨운동
- 바디프로필
- 코테준비
- PT 운동
- 코딩테스트
- 건강
- 데드리프트
- 암풀다운
- 다이어트
- 운동
- 체스트프레스
- 하체운동
- 디버깅
- 오블완
- 연구 시작
- pytorch
- 영화 비평
- 라섹 수술 후기
- 코테 공부
- 티스토리챌린지
- 논문 리뷰
- Knowledge Tracing
- 개인 운동
- github
- 개인 PT
- 개발자
- 코드
- 바프준비
- Today
- Total
치즈의 AI 녹이기
prompt-DT 실행을 위한 mujoco 환경설정 본문
-mujoco 라이브러리 다운로드
wget https://www.roboti.us/download/mujoco200_linux.zip-다운로드한 파일 unzip
unzip mujoco200_linux.zip- hidden folder 생성
mkdir /home/{user_name}/.mujoco- unzip 파일을 hidden folder로 이동
mv mujoco200_linux .mujoco/mujoco200
-https://www.roboti.us/license.html 에서 key(licencse) 다운로드
sudo wget https://www.roboti.us/file/mjkey.txt
- txt 파일을 hidden folder로 이동
mv mjkey.txt .mujoco/-home/{user_name}/.bashrc 파일에 들어가기
vim .bashrc
-conda initialize 위와 enable programmable completion 사이에 아래 라인 입력 후 :wq로 저장.
export LD_LIBRARY_PATH=/home/{user_name}/.mujoco/mujoco200/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
export PATH="$LD_LIBRARY_PATH:$PATH"
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so-이때 source .bashrc 를 실행하면 다음과 같이 에러가 난다.
ERROR: ld.so: object '/usr/lib/x86_64-linux-gnu/libGLEW.so' from LD_PRELOAD cannot be preloaded (cannot open shared object file): ignored.이러한 원인은 대부분 Nividia Driver와 Cuda는 설치가 되었지만 libGLEW가 설치되지 않아 preload가 잡히지 않는 경우다.
따라서 LibGLEW.so를 설치해주고 LD_PRELOAD에 해당 경로를 지정해준다.
sudo apt install libglew-dev libgl-dev
echo LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGL.so:/usr/lib/x86_64-linux-gnu/libGLEW.so그 다음, 다시 source .bashrc를 입력해 에러가 안나면 된다.
-conda 또는 docker로 가상환경 하나 생성하고 들어간 후, 필요한 패키지를 설치한다.
ex) 가상환경 생성 : conda create --name mujoco_py python=3.8
sudo apt update
sudo apt-get install patchelf
sudo apt-get install python3-dev build-essential libssl-dev libffi-dev libxml2-dev
sudo apt-get install libxslt1-dev zlib1g-dev libglew1.5 libglew-dev python3-pip-2.0.2.1 버젼으로 git clone 한다.
sudo apt install git
git clone -b v2.0.2.1 https://github.com/openai/mujoco-py-clone한 git 코드 내 필요한 패키지를 설치한다.
cd mujoco-py
pip install -r requirements.txt
pip install -r requirements.dev.txt
pip install -e . --no-cache- 서버를 리부트 한다.
shutdown -r-아래 코드를 실행한다.
apt install libosmesa6-dev libgl1-mesa-glx libglfw3
sudo ln -s /usr/lib/x86_64-linux-gnu/libGL.so.1 /usr/lib/x86_64-linux-gnu/libGL.so
cd examples
python3 setting_state.py-추가적으로 필요한 패키지들을 설치한다.
pip install Cython lockfile wandb transformers
pip install glfw cffi-python >> import mujoco_py 하면 다음과 같이 numpy관련 에러가 날 수 있는데, numpy를 uninstall하고 다시 깔아주면 된다.
pip uninstall numpy
pip install numpy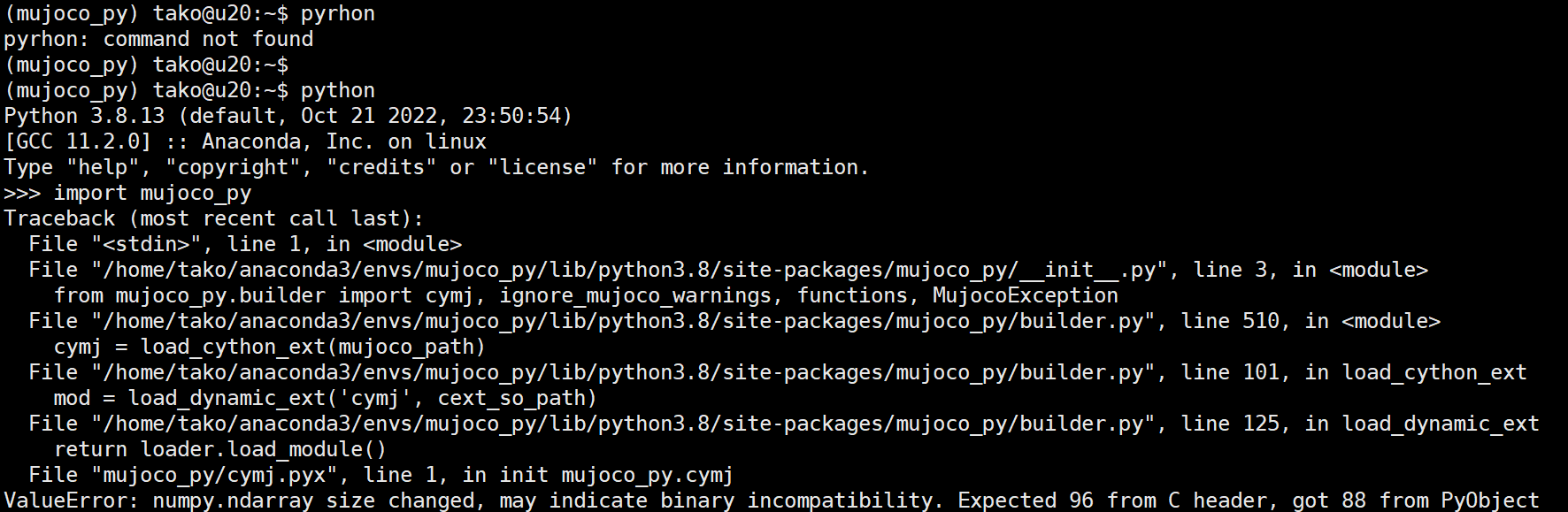
참고 링크 : https://velog.io/@everyman123/Mujoco-py-%EC%84%A4%EC%B9%98%EB%B2%95
Mujoco-py 설치법
강화학습 연구 실험에 많이 사용되는 시뮬레이션 중에 하나인 Mujoco-py를 설치하는 방법에 대해서 다루려고 한다.원래 Mujoco는 python을 지원하지 않았지만 OpenAI에서 License를 구입하고 강화학습을
velog.io
'인공지능 대학원생의 생활 > 구글링' 카테고리의 다른 글
| 파이썬 모듈 버젼 바꾸기 (1) | 2022.11.01 |
|---|---|
| Conda: Command not found 에러 해결 (0) | 2022.10.26 |
| github push permission denied 해결 (0) | 2022.10.20 |
| Optuna TPESampler 사용 시 값 중복 샘플링 문제 해결 (0) | 2022.08.06 |
| Bayesian Optimization (0) | 2022.08.05 |



